
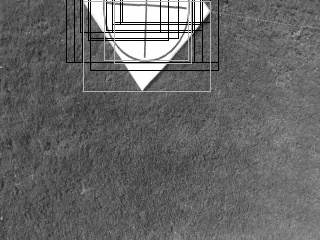
Figure: In this simulation, a quadcopter chases and lands on a moving target using vision. At a low altitude, the target is occluded because it gets too large to fit into an on-board camera image. I have derived a new particle filter framework that detects an occluded target using object proposals via contour trees. Each proposed object is evaluated by the normalized cross-correlation with a target image, and the score is sent to the particle filter framework to fuse multiple inputs. The target in this simulation is a deck pattern installed on a navy warship.
Figure: In this flight test, the system finds the helipad used in the MBZIRC robotics competition. Even when an aerial vehicle is flying low, and only the partial of the visual target is available from an on-board camera, my system successfully finds the occluded target.

Results of particle filtering and occluded target detecting over a deck pattern.
Results of occluded target detecting over a MBZIRC robotics challenge helipad.