
Figure: In this simulation, the vehicle does random searching until it finds a moving truck. Vision-based tracking is established with the measurements from the AprilTags located on the truck. An extended Kalman filter framework allows the fusion of the multiple vision measurements and estimates the velocity as well as the position and attitude.

The GTQ is flying over the roombas in the competition.
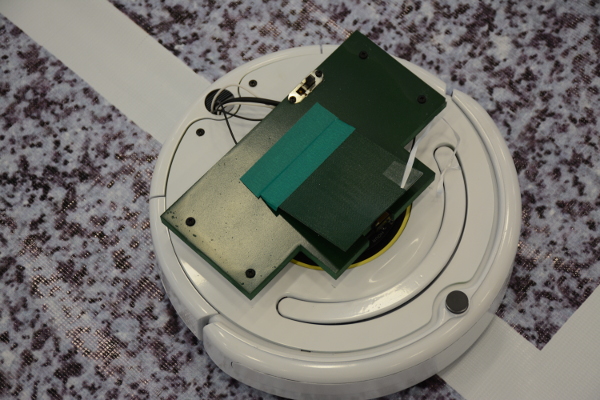
Each roomba has a dumper and a lever switch. A UAV can change the direction of the roomba by activating these sensors.
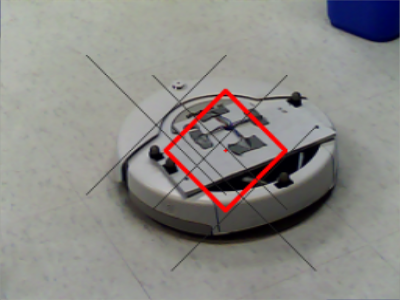
The Viola-Jone’s framework was used to pull target candidates. These candidates were filtered out by template matching and Kalman filter. I estimate the position and velocity of the target.